Team Organization
Challenge Overview
Intermediate Challenge
-
- Identify the color and ArUCo tag correctly
- Must be 100% accurate to get a time bonus
-
- Geolocate the balloon within a 2 foot margin
- Within 5 feet: same amount of points
- Program has to be the same on all three missions
- Pop the targeted balloon
- Geolocate the balloon within a 2 foot margin
- Not impacted by time bonus

Sweeping across the y-axis makes everything easier because it lowers the amount of data we needed to store by far and minimizes the amount of error-prone variables we needed to keep track of
This is probably the most important part of our strategy. While this assumption is flawed since the algorithm breaks if multiple balloons have the same tag ID, it means we don’t have to do ANY object detection tracking, or isolation ourselves, making our lives significantly easier
Not trying to decide which balloon is which looks weird at first, but we had our reasons
Algorithm Design
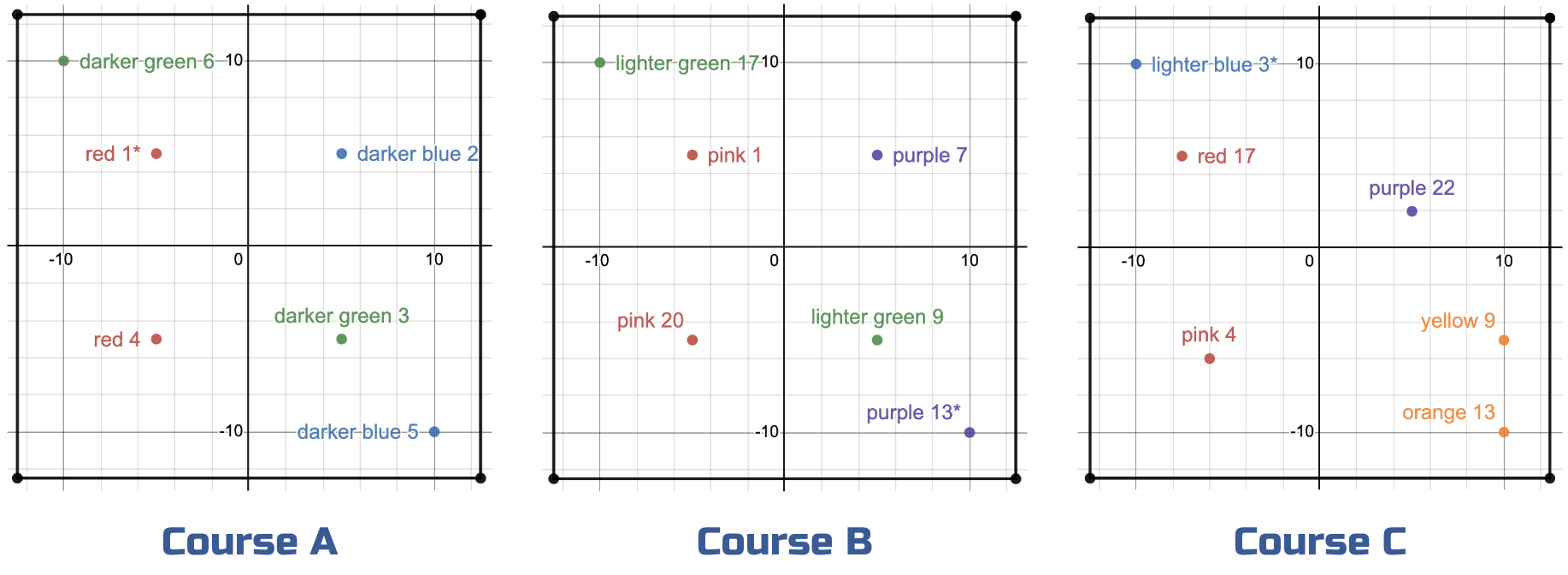
After realizing the complexity and longevity of our original code, we decided to simplify the challenge by only moving along the y-axis and calculate the focal point at the same time. By doing this, we can geolocate each balloon without any overlapping each other in every course so that we can run the same program for all three. The drone will start at the origin and move straight up, turn 90 degrees, move right all the way to the bottom, turn 180 degrees, and move all the way up, which will geolocate all the balloons and store each of the colors with the aruco tags and by inputting the target number and color, the drone will use the geolocated coordinate with the corresponding color and number and pop it.
Flight Testing
The video above is our submission for the Mission A Course. We successfully recognized all the colors and Aruco numbers along with geolocating each of the balloons with a 2 meter margin.
Rainbow Brick Road
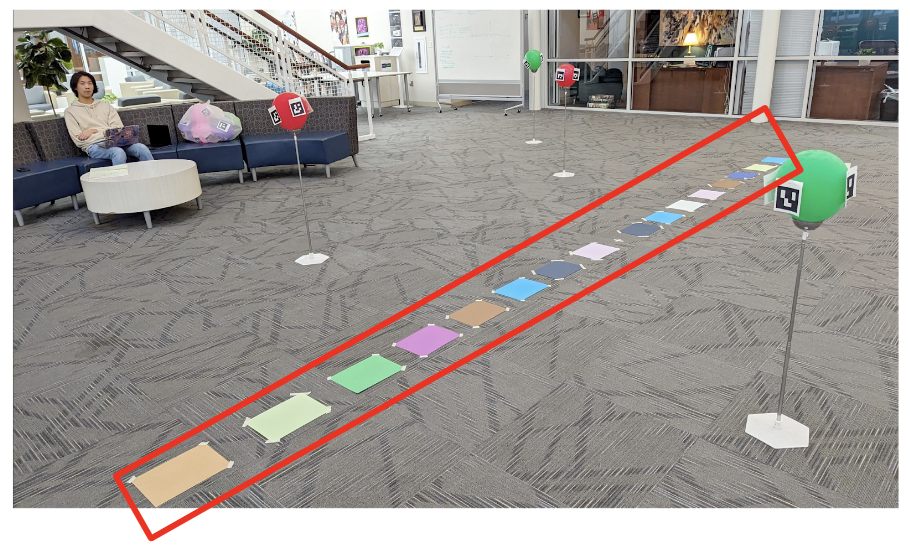
After many flight tests, we noticed the Tello drone drifting abundantly. Ian came up with a strategy of placing a strip of multi-colored pieces of paper along our flight path to stabilize the drone from drifting because the drone has cameras on the bottom and centers itself using pattern recognition. After implementing this, we noticed that the drone drifted less and flew along the flight path with ease.
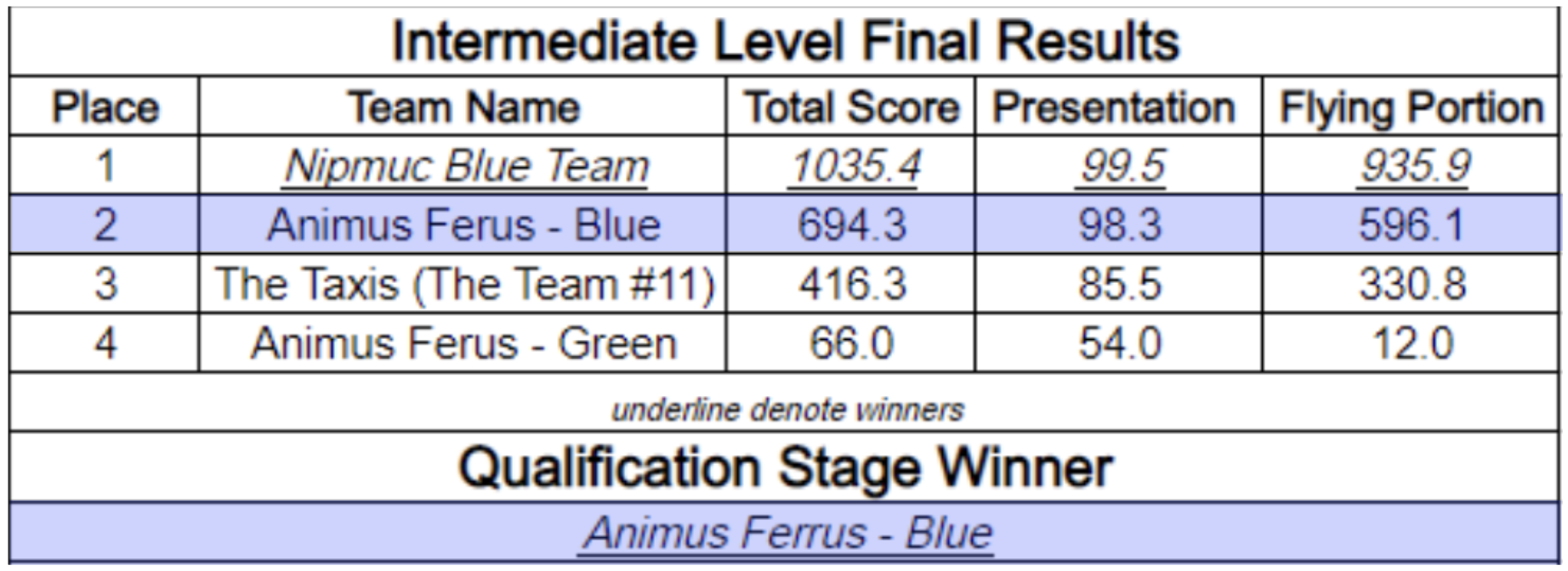
Results
Qualification Final Results
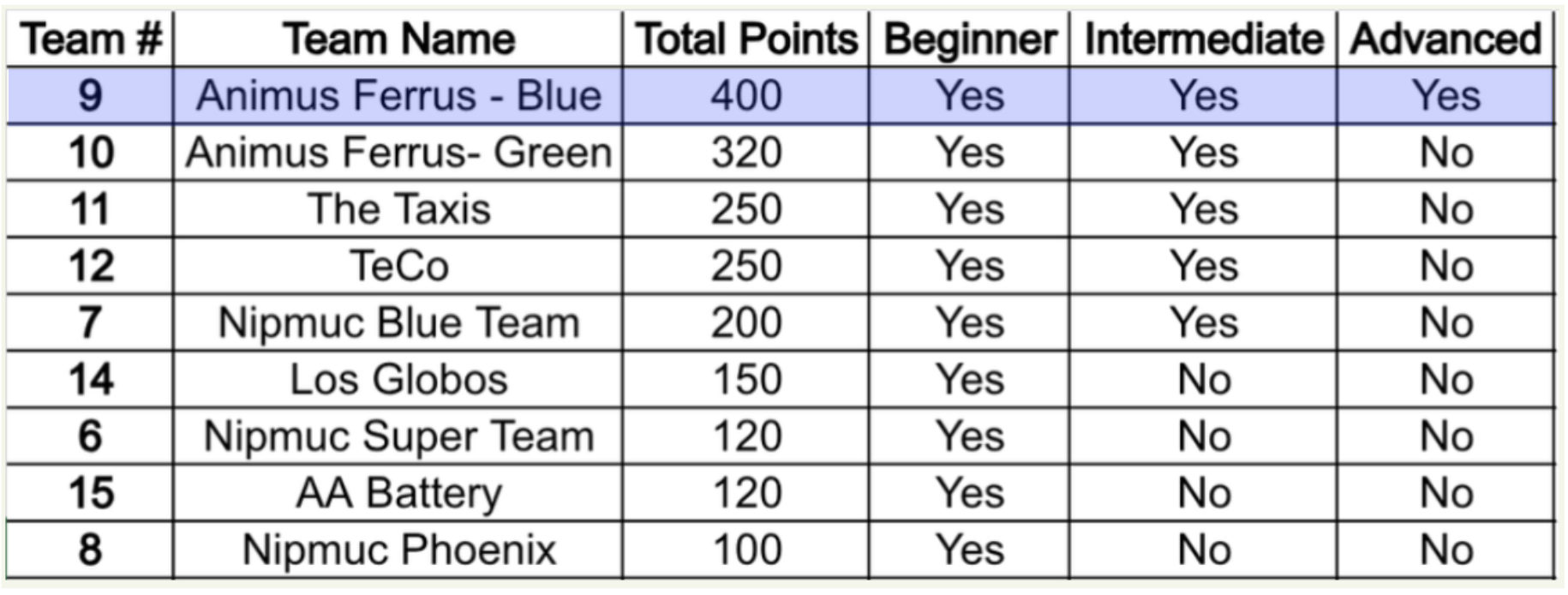
Competition Final Results